VirtualHand SDK
It simplifies simulation for developers in mechanical CAD, R&D, or 3D e-commerce allowing them to «hand-enable» their applications. The SDK consist of three main components:
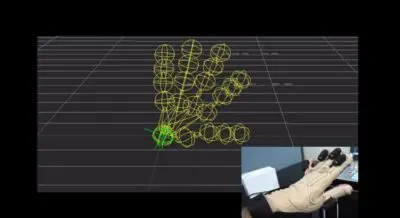
- VirtualHand API: A fully featured C++ development library including support for collision detection, hand interaction management, and force feedback.
- Device Manager: A multiplatform (W2K, NT, IRIX, and WinXP) network-aware device driver system for CyberGlove, CyberTouch, CyberGrasp, and CyberForce systems, as well as the Polhemus Fastrak and Ascension Flock of Birds six degrees of freedom (DOF) trackers.
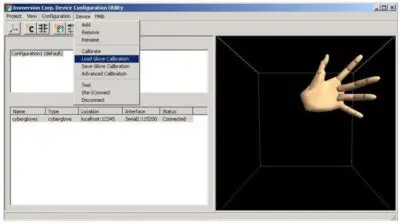
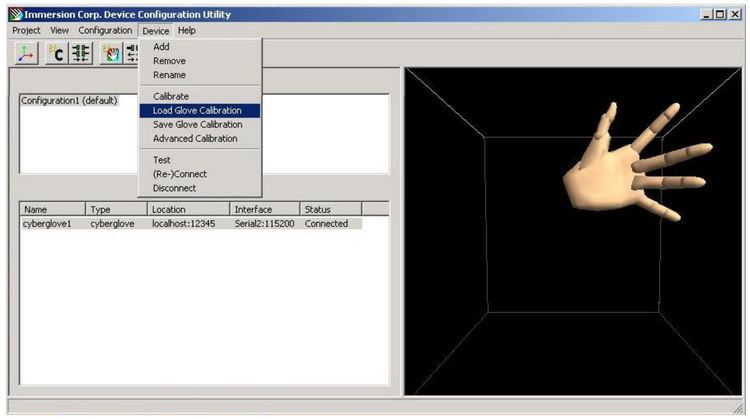
- Device Configuration Utility: A user friendly Windows-like interface to calibrate and configure your gloves, touches, grasps, and six-DOF trackers. The DCU allows you to save configurations and configure default settings.








Specifications:
- Offers an object-oriented model with an accompanying C++ library.
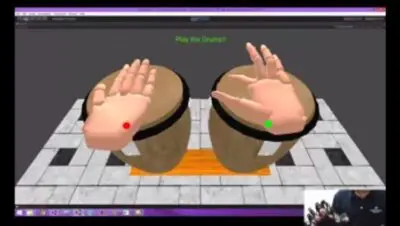
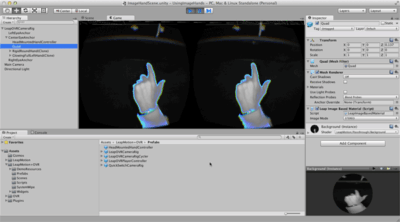
- Provides a general framework for constructing hand-enabled simulations from scratch or for integrating hand-interaction into existing applications.
- Includes a device configuration utility that lets users calibrate and configure CyberGlove Systems’s CyberGlove wired products and supported trackers in an intuitive and graphical manner.
- Offers real-time collision detection capabilities between 3D digital objects.
- Provides a force feedback interface for CyberGrasp and CyberForce system users.
- Offers full network support. A user can run an application on a host computer while getting device data from another machine, permitting interaction with geographically distributed teams.
- Includes grasping algorithms for picking up any arbitrary object loaded into the scene.
- Includes «ghost-hand» support for managing position-tracker offsets to prevent the graphical hand from passing through objects.
- Provides a fast polygon-level, collision-detection engine, including an open API for support of specialized third-party collision modules.
- Supplies an open API for model import and interfacing with third-party visualization software. A VRML/Cosmo (SGI Optimizer 1.2) implementation is included.
- Provides significantly improved overall structure with better run-time integrity and more complete error handling.
- Supplies acomplete set of open source demonstration applications showing how each of the toolkit features can be used in your development
More Information
Related Products

The MoCap Glove takes what the original CyberGlove products have established with 20 years of experience, producing improved and new

The wireless CyberGlove II motion capture data glove is fully instrumented with up to 22 high-accuracy joint-angle measurements. It uses

This new deviation of the CyberTouch product line incorporates vibrotactile sensors into the inside of the fingertips.

The CyberTouch system is a tactile feedback option for CyberGlove Systems's wired CyberGlove instrumented glove. It features small vibrotactile stimulators

The CyberGrasp system is an innovative force feedback system for your fingers and hand. It lets you "reach into your

The CyberForce system is an option designed to work with the CyberGrasp exoskeleton, the award-winning, lightweight, force-reflecting system that fits

The Haptic Workstation is a fully integrated simulation system providing right and left whole-hand haptic feedback, immersive 3D viewing, and
Specifications and other information are subject to change without notice. All brand and product names are trademarks or registered trademarks of their respective holders. The information on this webpage is provided by the respective named manufacturer and is for general information purposes. These data constitute a concrete indication of properties and condition only if they are expressly indicated by EST or have been agreed upon as a condition in writing.