omega.x

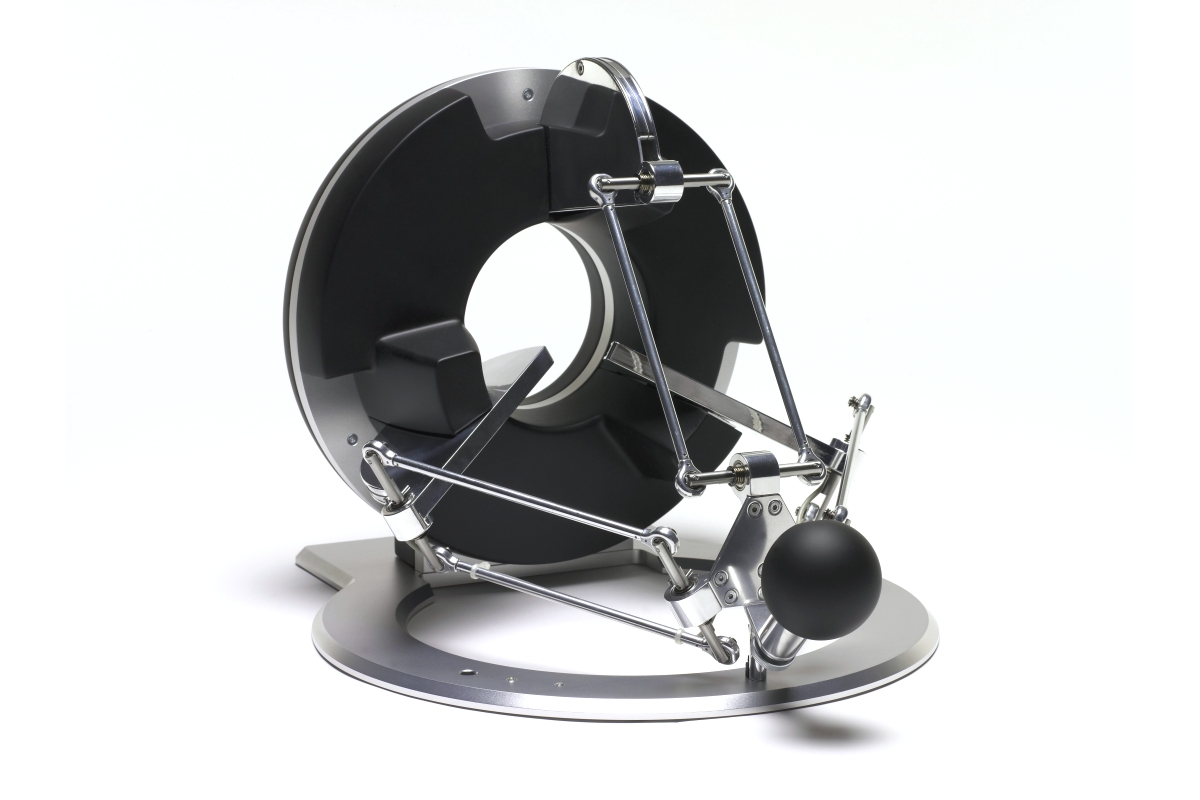
omega.3
The omega.x family of haptic devices combine performance and design into one of the most accomplished and modular haptic interfaces ever built. The device can be declined in three versions that provide translational, rotational and grasping capabilities.
With fine polished kinematic links and an anodized aluminum frame, the omega.3 displays unparalleled solidity with simplicity and style. Its finely textured spherical end-effector offers a universal interface for both left- and right-handed users. This highly ergonomic and distinctive design makes the omega.3 a device of choice when performing dexterous robotic telemanipulation tasks, or for instinctively interacting with complex virtual environments that demand user-friendly interfaces with optimal usability.
omega.6
The omega.6 haptic device sports a pen-shaped end-effector with a wide range of wrist motion. Building on the omega.x base, its design provides perfect decoupling of translation and rotation movements.
The Haptic SDK provides full access of the wrist orientation as either joint angle values or as a rotation matrix expressed in Cartesian space. The position of device end-effector is provided in Cartesian coordinates.
The combination of full gravity compensation and driftless calibration contributes to greater user comfort and accuracy of the device. The omega.6 comes in either left- or right-hand configuration and leverages all translational force feedback capabilities of the omega.3.
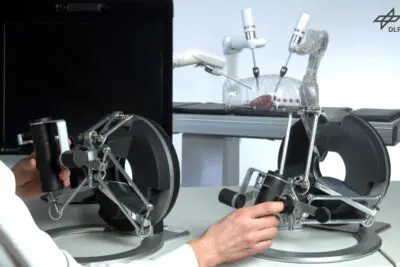
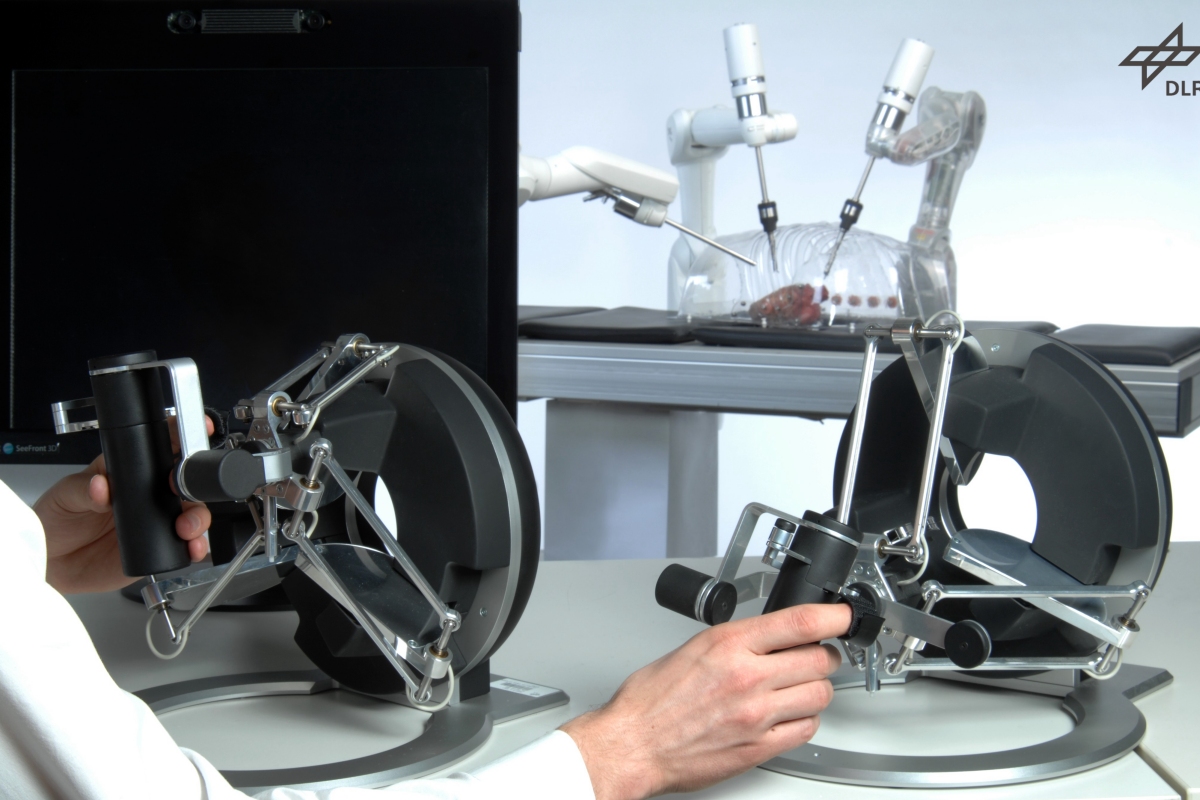
omega.7
With its unique active grasping extension, the omega.7 is the most versatile haptic device available. Its end-effector covers the natural range of motion of the human hand and is compatible with bi-manual teleoperation console design.
The combination of full gravity compensation and driftless calibration contributes to greater user comfort and accuracy. The active gripper can generate a grasping force of up to 8 Newtons in both directions.
The omega.7 comes in either left- or right-hand configuration and leverages all translational force feedback capabilities of the omega.3.
Workspace
translation
∅ 160 x 110 mm
Forces
translation
12.0 N
Resolution
translation
< 0.01 mm
Interface
standard
rate
USB 2.0
up to 4 KHz
Power
universal
100V – 240V
platforms
Microsoft
Linux
Apple
Blackberry
WindRiver
Windows
all distributions
macOS
QNX
VxWorks
Software
SDK Haptics
SDK Robotics
CHAI3D
Ergonomics
the device can be used with both left and right hands
Structure
delta-based parallel kinematics
active gravity compensation
Calibration
automatic
driftless
User input
1 user button
Safety
velocity monitoring
electromagnetic damping
Workspace
translation
rotation
∅ 160 x 110 mm
240 x 140 x 320 deg
Forces
translation
rotation
12.0 N
not actuated
Resolution
translation
rotation
< 0.01 mm
0.09 deg
Interface
standard
rate
USB 2.0
up to 4 KHz
Power
universal
100V – 240V
platforms
Microsoft
Linux
Apple
Blackberry
WindRiver
Windows
all distributions
macOS
QNX
VxWorks
Software
SDK Haptics
SDK Robotics
CHAI3D
Ergonomics
available in left- and right-hand configuration
Structure
delta-based parallel kinematics
hand-centered rotation movements
decoupling between translation and rotation movements
active gravity compensation
Calibration
automatic
driftless
User input
1 user button
Safety
velocity monitoring
electromagnetic damping
Workspace
translation
rotation
gripper
∅ 160 x 110 mm
240 x 140 x 320 deg
25 mm
Forces
translation
rotation
gripper
12.0 N
not actuated
8.0 N
Resolution
translation
rotation
gripper
< 0.01 mm
0.09 deg
0.006mm
Interface
standard
rate
USB 2.0
up to 4 KHz
Power
universal
100V – 240V
platforms
Microsoft
Linux
Apple
Blackberry
WindRiver
Windows
all distributions
macOS
QNX
VxWorks
Software
SDK Haptics
SDK Robotics
CHAI3D
Ergonomics
available in left- and right-hand configuration
Structure
delta-based parallel kinematics
hand-centered rotation movements
decoupling between translation and rotation movements
active gravity compensation
Calibration
automatic
driftless
User input
1 simulated button using the force gripper
Safety
velocity monitoring
electromagnetic damping















More Information
Related Products
The Force Dimension SDK is the software interface that enables users to easily add haptic capability to their application.
Spezifikationen und andere Informationen können ohne vorherige Ankündigung geändert werden. Alle Marken- und Produktnamen sind Warenzeichen oder eingetragene Warenzeichen ihrer jeweiligen Inhaber. Die Informationen auf dieser Webseite werden von den jeweils genannten Herstellern bereitgestellt und dienen der allgemeinen Information. Diese Angaben stellen nur dann eine konkrete Beschaffenheitsangabe dar, wenn sie von EST ausdrücklich angegeben oder schriftlich als Beschaffenheit vereinbart werden.