CyberGrasp
The CyberGrasp system is an innovative force feedback system for your fingers and hand. It lets you “reach into your computer” and grasp computer-generated or tele-manipulated objects.
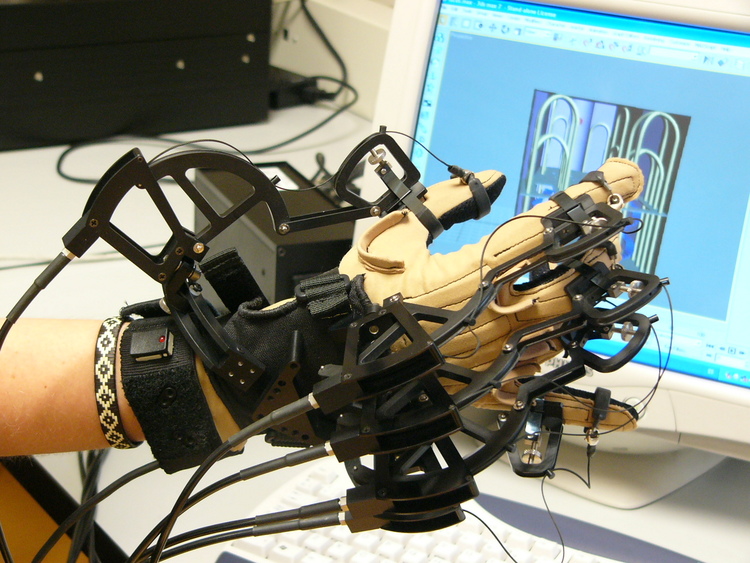
The CyberGrasp device is a lightweight, force-reflecting exoskeleton that fits over a CyberGlove data glove (wired version) and adds resistive force feedback to each finger. With the CyberGrasp force feedback system, users are able to feel the size and shape of computer-generated 3D objects in a simulated virtual world.
Grasp forces are produced by a network of tendons routed to the fingertips via the exoskeleton. There are five actuators, one for each finger, which can be individually programmed to prevent the user’s fingers from penetrating or crushing a virtual solid object. The high-bandwidth actuators are located in a small actuator module, which can be placed on the desktop. Additionally, since the CyberGrasp system does not provide grounded forces, the actuator module can also be worn in a GraspPack backpack for portable operation, dramatically increasing the effective workspace.
The device exerts grasp forces that are roughly perpendicular to the fingertips throughout the range of motion, and forces can be specified individually. The CyberGrasp system allows full range-of-motion of the hand and does not obstruct the wearer’s movements. The device is fully adjustable and designed to fit a wide variety of hands.
Originally developed under STTR contract to the United States Navy for use in telerobotic applications, the CyberGrasp system allows an operator to control a remotely-located robotic “hand” and literally “feel” the object being manipulated.




Specifications:
- Force: 12 N per finger (max, continuous)
- Weight: 16 oz (exoskeleton without CyberGlove system)
- Workspace: 1 meter spherical radius from the Actuator Module
- CyberGlove: A CyberGlove device is required for a CyberGrasp system (22-sensor CyberGlove device recommended)
- Instrumentation Unit: A Force Control Unit and Actuator Module are included
- Interface: Ethernet
- CyberForce robotic armature option recommended with the CyberGrasp system
More Information
Related Products

The MoCap Glove takes what the original CyberGlove products have established with 20 years of experience, producing improved and new

The wireless CyberGlove II motion capture data glove is fully instrumented with up to 22 high-accuracy joint-angle measurements. It uses

This new deviation of the CyberTouch product line incorporates vibrotactile sensors into the inside of the fingertips.

The CyberTouch system is a tactile feedback option for CyberGlove Systems's wired CyberGlove instrumented glove. It features small vibrotactile stimulators

The CyberForce system is an option designed to work with the CyberGrasp exoskeleton, the award-winning, lightweight, force-reflecting system that fits

The Haptic Workstation is a fully integrated simulation system providing right and left whole-hand haptic feedback, immersive 3D viewing, and

VirtualHand SDK is a complete development solution for adding hand-motion capture, hand-interaction, and force feedback to simulation applications.
Specifications and other information are subject to change without notice. All brand and product names are trademarks or registered trademarks of their respective holders. The information on this webpage is provided by the respective named manufacturer and is for general information purposes. These data constitute a concrete indication of properties and condition only if they are expressly indicated by EST or have been agreed upon as a condition in writing.